研究の背景
電磁モータや油空圧シリンダなどの一般的なアクチュエータは高剛性の材料で構成され,高速・高精度な動作を実現しています。一方,空気圧人工筋肉はゴムと繊維から構成される柔らかいアクチュエータであり,柔軟性に起因する高い安全性が特徴となります。その特徴からリハビリ機器やパワーアシスト装置などヒトとの親和性が必要となる機械システムへの導入が期待されています。
研究の目的と内容
本研究では空気圧人工筋肉の利便性の向上を目指して,空気圧人工筋肉にセンサを複合する取り組みを行っています。空気圧人工筋肉を構成する繊維に着目し,繊維を機能性繊維におきかえることでアクチュエータとしての構成要素がそのままセンサとして機能する構造を実現しています。また,組紐の製造技術を取り入れることで容易な製造プロセスを確立しています。これまでに導電性繊維や光ファイバを用いることで自己の駆動変位が推定可能な空気圧人工筋肉を開発しています。

組紐製造プロセスによるセンサ機能付き空気圧人工筋肉の製作
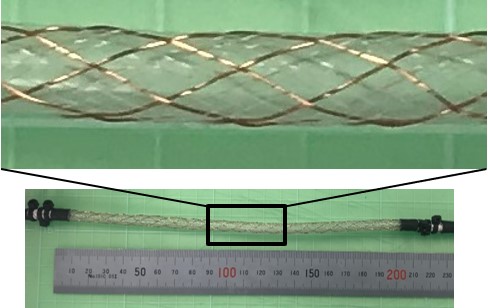
センサ機能付き空気圧人工筋肉